


SI便り 筋電センサを使って身の回りのものをロボット化してみよう!
山脇の学び
本校の科学技術系継続実験室にて、夏期特別実験講座「筋電センサを使って身の回りのものをロボット化してみよう!」を実施しました。
ロボットの講座は、今年で6回目ですが、昨年に引き続き東京理科大学の橋本卓弥先生をお迎えし、中学1年生と3年生30名が、自分の筋肉の動きによって自作のロボットを操作する体験をしました。
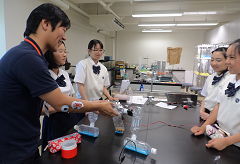
筋肉の活動を表す筋電位を計測する「表面筋電位センサ」はスポーツや医療の場で使われているものです。これを自分の腕の筋肉の部分に装着し、手首を上下に動かすことで発生する筋電位を測定します。この筋電位をマイコン「Arduino」に入力し、その値によってサーボモータが回転するようにプログラム制御しました。
先生の解説を伺って、さあ作成開始です。
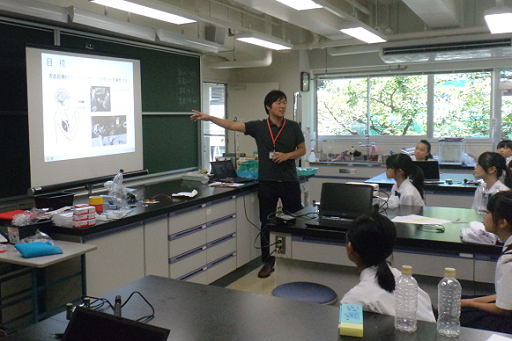
いよいよ始まります

どんなロボットにしようかな

グルーガンでサーボモータを接着

みな真剣です
普段のクラスとは異なる仲間とチームを組んでいますので、まずは自己紹介。そして互いの意見を出し合いながら構想を立て、ペットボトルをつなげてロボットの形にしていきます。移動するロボットにするためにサーボモータを取り付けながらの作業ですが、いざ電極を付けた腕を動かしてもなかなかロボットは動いてはくれません。ロボットの動きを想像しながら工夫を重ねます。組み立てたロボットをバラバラにして一からやり直しをする班もありました。腕に電極を付けた橋本先生と二人のTAの方々が各班を廻りながら少しずつアドバイスをくださいます。
橋本先生の腕には常に電極が

橋本先生の腕には常に電極が・・・
試行錯誤の末、少しずつ前に進むロボットが出てきました。
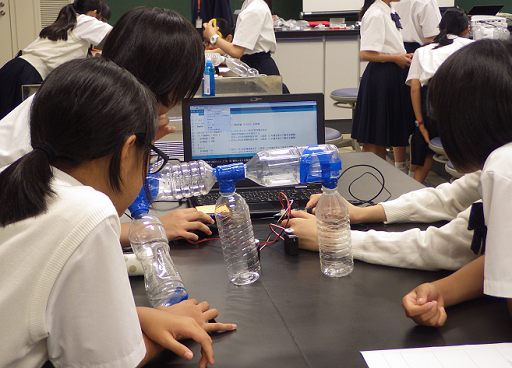
PCで回転角度を制御
改良を繰り返し
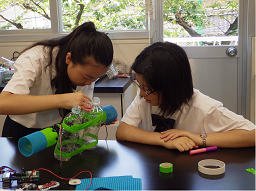
最後は発表会です。
各班ごとに一人ずつプレゼンテーションしていきます。そして手首を上下させ筋肉を動かしてロボットを操作しました。 思ったように動かないロボットも含め、班ごとに工夫がある個性的なペットボトルロボットが完成し、満足の内に二日間の講座が終了しました。

各班の発表です

筋肉に力を入れて

なかなか難しい
~夏期実験講座を終えて~
・自分でもまた機会があったらロボットを作ってみたいです。ロボットを作るのはとても大変だったので、今の時代にある「しゃべるロボット」がとてもすごいと感じました。貴重な体験ができ良かったです。(ロボット名:エイリアン・・・動きが怖かったから)
・今回の講座では、後ろに動くロボットしか作れなかったので、前に動くロボットを2つ作って対戦させてみたい。(ロボット名:バックン)
・筋肉を動かすための脳から発せられた微弱電気信号でロボットを動かせることに驚いた。人間みたいなロボットを自分でもつくれたらおもしろいと思った。(ロボット名:バックン)
・ペットボトルだけでなく、もともと物として売られているもの+モーターのように、皆が使えるものを作りたいと思った。目や足など身体に障害がある方に、このロボットは自動だから楽だねと言ってもらえるような誰でも自動で操作できるものを作りたいと思った。(ロボット名:キリンになれなかった馬)
(1)工夫した点:一番工夫したのは、おもりの位置です。班の人と協力して、試行錯誤を繰り返しました。初めは転んでばかりだった未来ちゃんも、前進できるようになりました。
(2)できた点:作品が完成したのはもちろんのこと、協力することです。最初は気まずく始まった4班でしたが、最後には分担も決まり話し合いながら実験できました。
(3)苦労した点:歩くように動くのを予定していましたが、モアイ像のように動く未来ちゃんになりました。また、歩幅の角度の調節も難しかったことの一つです。短すぎても転んでしまい、長すぎても、変なふうに開いてしまうことです。(ロボット名:未来ちゃん)